Nissan Ariya: ProPILOT Park
ProPILOT Park ist eine Funktion, die paralleles Einparken, Rückwärtseinparken in Parkbuchten und Vorwärtseinparken in Parkbuchten unterstützt.
Sie verwendet das Kamerasystem und die Einparkhilfe (Sonar) zur Erkennung der Parkposition und steuert Gaspedal, Bremse und Lenkrad sowie Schaltvorgänge, um eine Reihe von Einparkvorgängen zu ermöglichen.
WARNUNG
- Die Leistung von ProPILOT Park ist gewissen Beschränkungen unterworfen.
Als Fahrzeugführer sind Sie stets für sicheren Fahrbetrieb verantwortlich. Prüfen Sie daher die Umgebungsbedingungen durch eine direkte Sichtkontrolle oder über die Spiegel, wie auch bei normalem Fahrbetrieb.
Betätigen Sie die Bremsen, um das Fahrzeug anzuhalten, wenn es im Begriff steht, mit Fahrzeugen, Personen oder Gegenständen in der Nähe zusammenzustoßen.
- Die Einparkhilfesensoren (Sonar) und Kameras unterliegen Einschränkungen.
Es kann sein, dass die Parkpositionen oder die Gegenlenkvorgänge nicht korrekt
eingestellt werden, weil das System die Hindernisse nicht erkennen kann.
Einzelheiten finden Sie unter "Erfassungsbedingungen und Einschränkungen der Einparkhilfe (Sonar)" und "Erfassungsbedingungen und Einschränkungen des Intelligent Around View Monitor".
- Fassen Sie nicht in die Lenkradspeichen, während die Lenksteuerung in
Betrieb ist.
Es besteht die Gefahr, dass sich Hände oder Finger verfangen, was zu Verletzungen führen kann. Stellen Sie zudem sicher, dass sich Krawatten, Schals oder andere Gegenstände nicht verfangen. Es kann zu unerwarteten Unfällen kommen.
- Schalter für ProPILOT Park
- Betrieb von ProPILOT Park
- Deaktivierung von ProPILOT Park
- Einparkmethoden von ProPILOT Park
- Parkpositionserkennungsfunktion
- Vorsichtsmaßnahmen für ProPILOT Park
- Einstellungen von ProPILOT Park
- Erfassungsbedingungen und Einschränkungen von ProPILOT Park
Schalter für ProPILOT Park
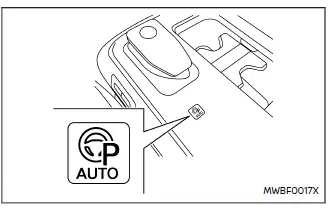
Drücken Sie diesen Schalter, um ProPILOT Park zu aktivieren.
ProPILOT Park wird auf dem Navigationssystembildschirm angezeigt.
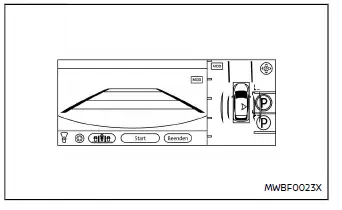
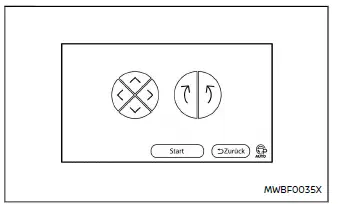
Bildschirm von ProPILOT Park
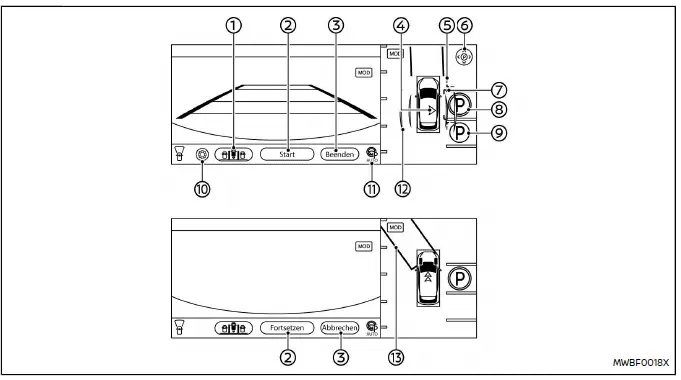
- Symbol für Auswahl der Einparkmethode:
Zeigt die aktuell ausgewählte Einparkmethode an. Berühren, um die Einparkmethode zu ändern. - [Start]/[Fortsetzen]:
Berühren Sie diese Schaltfläche, um die Steuerung von ProPILOT Park zu starten. - [Beenden]/[Abbrechen]:
Berühren Sie diese Schaltfläche, um ProPILOT Park zu deaktivieren. - Symbol zur Erfassung der Parklücke:
Zeigt an, auf welcher Seite die Parklücke bei der Parklückensuche erfasst wurde. : Es wird eine
Parklücke auf der rechten Seite erfasst.
: Es wird eine
Parklücke auf der rechten Seite erfasst. : Es wird eine Parklücke
auf der linken Seite erfasst.
: Es wird eine Parklücke
auf der linken Seite erfasst. - Abstandsführungslinien (rot):
Zeigt den ungefähren Bereich an, den das Fahrzeug bei aktiver Parksteuerung durchfährt. - Einstellsymbol für Parkleitfläche (
 ):
):
Berühren Sie diese Schaltfläche, um die Lage der Parkleitfläche anzupassen. - Parkleitfläche (grün):
Zeigt die ungefähre Position an, an der das Fahrzeug geparkt wird. Die Fläche wechselt zu Hellblau, wenn die Parksteuerung aktiv ist. - Zeichen (blau):
Zeigt die Position an, an der das Fahrzeug geparkt wird. - Zeichen (farblos):
Zeigt ein wählbare Parkposition neben der ausgewählten Parkposition an. Beim Berühren ändert sich das Symbol zu Blau. - Einstellungssymbol (
 ):
):
Berühren Sie dieses Symbol, um die Einstellungen von ProPILOT Park zu ändern. - Steuersymbol von ProPILOT Park (
 ):
):
Der Steuerstatus von ProPILOT Park wird anhand von Farben angezeigt.Grün: Die Parksteuerung ist aktiv.
Grau: Die Parksteuerung ist nicht aktiv.
- Führungslinienbereich beim Suchen der Parklücke (hellblau):
Zeigt an, dass das System aktuell nach einer Parklücke sucht. Linien werden auch als Orientierung für die Fahrzeugposition bei der Parklückensuche verwendet. - Positionsrechteck für Richtungsänderung (grün):
Zeigt die Stelle an, bei der die nächste Schaltänderung erfolgen soll.
HINWEIS:
Wenn die Scheibenwischer in Betrieb sind oder Wasser bzw. eine andere Substanz
auf der Kameralinse erkannt wird, wird das Zeichen
 angezeigt. Wenn die Taste
angezeigt. Wenn die Taste
 angezeigt wird, sind die erkennbaren
Parkpositionen eingeschränkt.
angezeigt wird, sind die erkennbaren
Parkpositionen eingeschränkt.
Wenn die Fahrgeschwindigkeit 10 km/h oder mehr erreicht
Wenn die Fahrgeschwindigkeit ca. 10 km/h oder mehr erreicht, während die Parkpositionserkennung arbeitet, ändert sich der Bildschirm. Wenn die Fahrgeschwindigkeit auf ca. 10 km/h oder darunter fällt, wird wieder zum normalen Bildschirm von ProPILOT Park gewechselt.
Auswählen der Einparkmethode
Sie können die Einparkmethode ändern, indem Sie das Symbol für die Auswahl der Einparkmethode berühren, bevor Sie [Start] berühren.
Die Einparkmethode ändert sich jedes Mal, wenn Sie das Symbol für die Auswahl der Einparkmethode berühren.
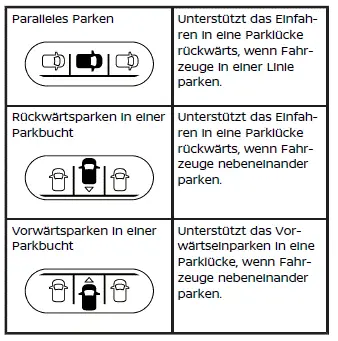
Verfügbare Methoden
Betrieb von ProPILOT Park
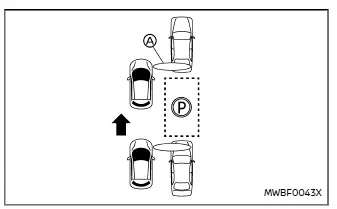
Paralleles Parken
1. Fahren Sie mit verminderter Geschwindigkeit vorwärts.
2. Drücken Sie den Schalter für ProPILOT Park. ProPILOT Park wird aktiviert.
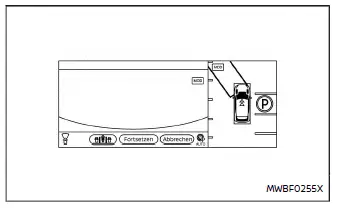
3. Fahren Sie langsam vorwärts. Das System sucht dann nach einer Parklücke. Das System gibt einen akustischen Signalton aus und zeigt P an, wenn eine Parklücke erfasst wurde und das Fahrzeug die korrekte Position für die Rückwärtsfahrt erreicht hat.
Betätigen Sie das Bremspedal, um das Fahrzeug anzuhalten.
4. Halten Sie das Bremspedal betätigt und berühren Sie [Start] auf dem Bildschirm. Das Steuersymbol von ProPILOT Park wechselt zu Grün und die Bremsen werden automatisch betätigt, um das Fahrzeug an Ort und Stelle zu halten. Die Parksteuerung kann nicht gestartet werden, wenn von Einparkhilfe (Sonar) und Kameras ein Hindernis erkannt wird und das System feststellt, dass nicht in die Parkposition manövriert werden kann.
Parken Sie in das Fahrzeug in diesem Fall manuelle ein.
5. Lassen Sie das Bremspedal los, und das Fahrzeug bewegt sich in das Positionsrechteck für Richtungsänderung (in die Pfeilrichtung des Fahrzeugsymbols). Betätigen Sie das Bremspedal und ändern Sie die Fahrgeschwindigkeit entsprechend den Umgebungsbedingungen.
6. Wenn das Fahrzeug das nächste Positionsrechteck für Richtungsänderung (grün) erreicht hat, wechselt der Schalthebel automatisch. Wenn es aufgrund eines Hindernisses nicht möglich ist, das Positionsrechteck für Richtungsänderung (grün) zu erreichen, betätigen Sie das Bremspedal und halten Sie das Fahrzeug in der Nähe des Hindernisses an. Ändern Sie die Schalthebelposition, um die Richtung zu wechseln. Siehe "Ändern der Fahrtrichtung der Parksteuerung".
7. Sobald sich das Fahrzeug in der Parkleitfläche (hellblau) befindet, hält das Fahrzeug an und die Parksteuerung wird beendet. Ein Hinweiston und die Anzeige machen den Fahrer auf das Ende der Parksteuerung aufmerksam.
Zu diesem Zeitpunkt wechselt die Schaltposition zu P (Parken) und die elektrische Feststellbremse wird aktiviert.
Die Parksteuerung kann automatisch beendet werden, bevor sich das Fahrzeug in der Parkleitfläche (hellblau) befindet. Siehe "Automatische Deaktivierung bei laufender Parksteuerung (Fahrzeug in Bewegung)".
Wenn die Parkleitfläche durch ein Hindernis blockiert oder aus einem anderen Grund nicht zugänglich ist, betätigen Sie das Bremspedal, um das Fahrzeug anzuhalten, und berühren Sie dann [Abbrechen] auf dem Bildschirm, um ProPILOT Park zu deaktivieren. Parken Sie das Fahrzeug manuell oder bewegen Sie es in eine besser geeignete Position.
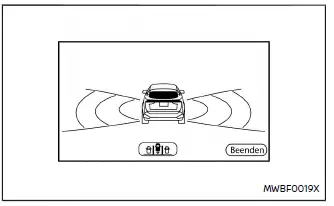
Parken in einer Parkbucht
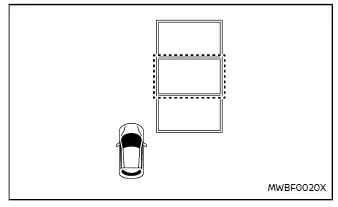
- Halten Sie das Fahrzeug in der Nähe der gewünschten Position an.
- Drücken Sie den Schalter für ProPILOT Park. ProPILOT Park wird aktiviert.
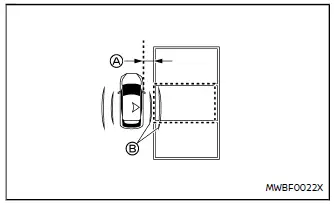
- Ca. 1 m (3 ft)
- Führungslinienbereich beim Suchen der Parklücke (hellblau)
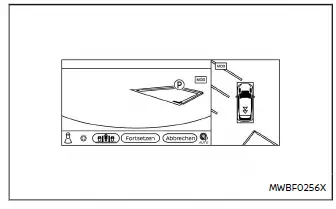
3. Fahren Sie langsam vorwärts und halten Sie neben der gewünschten Parklücke
an (in einem Abstand von ca. 1 m (3 ft) ). Halten Sie das Fahrzeug so an,
dass sich Erkennungssymbol für eine Parklücke
 ungefähr
mittig neben der gewünschten Parklücke befindet. Siehe "Parken in einer Parkbucht".
ungefähr
mittig neben der gewünschten Parklücke befindet. Siehe "Parken in einer Parkbucht".
Positionieren Sie das Fahrzeug so, dass sich die Endlinie der Parklücke innerhalb des Führungslinienbereichs beim Suchen der Parklücke (hellblau) für eine einfachere Erkennung befindet.
4. Stellen Sie bei angehaltenem Fahrzeug sicher, dass P für die gewünschte Parklücke angezeigt wird.
Stellen Sie sicher, dass ein Einparken in der durch P angezeigten Parklücke möglich ist.
Stellen Sie sicher, dass sich keine Hindernisse in der Parklücke bzw. dem umgebenden Bereiche befinden und dass die Parklücke eine ausreichende Größe aufweist.
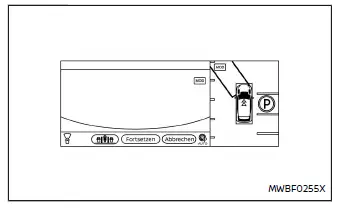
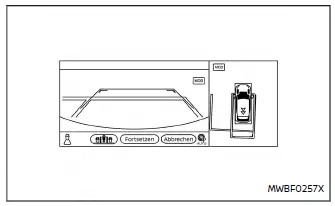
5. Halten Sie das Bremspedal betätigt und berühren Sie [Start] auf dem Bildschirm.
Das Steuersymbol von ProPILOT Park
 wechselt
zu Grün und die Bremsen werden automatisch betätigt, um das Fahrzeug an Ort und
Stelle zu halten. Die Parksteuerung kann nicht gestartet werden, wenn von Einparkhilfe
(Sonar) und Kameras ein Hindernis erkannt wird und das System feststellt, dass nicht
in die Parkposition manövriert werden kann.
wechselt
zu Grün und die Bremsen werden automatisch betätigt, um das Fahrzeug an Ort und
Stelle zu halten. Die Parksteuerung kann nicht gestartet werden, wenn von Einparkhilfe
(Sonar) und Kameras ein Hindernis erkannt wird und das System feststellt, dass nicht
in die Parkposition manövriert werden kann.
Parken Sie in das Fahrzeug in diesem Fall manuelle ein.
6. Lassen Sie das Bremspedal los, und das Fahrzeug bewegt sich in das Positionsrechteck für Richtungsänderung (in die Pfeilrichtung des Fahrzeugsymbols).
Betätigen Sie das Bremspedal und ändern Sie die Fahrgeschwindigkeit entsprechend den Umgebungsbedingungen.
7. Wenn das Fahrzeug das Positionsrechteck für Richtungsänderung (grün) erreicht, wechselt die Schaltstellung automatisch und das Fahrzeug fährt rückwärts. Wenn es aufgrund eines Hindernisses nicht möglich ist, das Positionsrechteck für Richtungsänderung (grün) zu erreichen, betätigen Sie das Bremspedal und halten Sie das Fahrzeug in der Nähe des Hindernisses an. Ändern Sie die Schalthebelposition, um die Richtung zu wechseln.
8. Sobald sich das Fahrzeug in der Parkleitfläche (hellblau) befindet, hält das Fahrzeug an und die Parksteuerung wird beendet. Ein Hinweiston und die Anzeige machen den Fahrer auf das Ende der Parksteuerung aufmerksam.
Zu diesem Zeitpunkt wechselt die Schaltposition zu P (Parken) und die elektrische Feststellbremse wird aktiviert.
Die Parksteuerung kann automatisch beendet werden, bevor sich das Fahrzeug in der Parkleitfläche (hellblau) befindet. Siehe "Automatische Deaktivierung bei laufender Parksteuerung (Fahrzeug in Bewegung)".
Wenn die Parkleitfläche durch ein Hindernis blockiert oder aus einem anderen Grund nicht zugänglich ist, betätigen Sie das Bremspedal, um das Fahrzeug anzuhalten, und berühren Sie dann [Abbrechen] auf dem Bildschirm, um ProPILOT Park zu deaktivieren. Parken Sie das Fahrzeug manuell oder bewegen Sie es in eine besser geeignete Position.
HINWEIS:
- Sie können ProPILOT Park auch aktivieren, indem Sie auf die Taste KAMERA
drücken und dann
 auf dem Bildschirm des Intelligent Around View Monitor berühren.
auf dem Bildschirm des Intelligent Around View Monitor berühren. - Bei aktiviertem ProPILOT Park sind die Lautstärke des Audiosystems sowie andere Geräusche reduziert.
- Wenn die Parkleitfläche keine Position anzeigt, an der tatsächlich geparkt werden kann (weil ein Hindernis oder ein Rinnstein vorhanden ist), stellen Sie eine geeignete Parkposition von Hand ein.
- Wenn die Einstellung [Parallel-Parklücken auf beiden Seiten erkennen] aktiviert ist und auf beiden Seiten Parklücken erfasst werden, kann der Schalter für die Richtungsblinker verwendet werden, um die gewünschte Seite auszuwählen, wenn Parklücken auf beiden Seiten erkannt werden.
- Selbst wenn das System einmal eine Parklücke erfasst, kann die erfasste Parklücke verschwinden oder das Einparken kann je nach Umstände der Hindernisse nicht gestartet werden, etwa aufgrund der Breite der Parkreihe.
- Bei Beginn der Parksteuerung wird die Einparkhilfe (Sonar) automatisch
eingeschaltet.
Bei Deaktivierung von ProPILOT Park kehrt die Einparkhilfe (Sonar) wieder in den Zustand zurück, der auf der Fahrzeuginformationsanzeige eingestellt wurde.
- Bei aktiver Parksteuerung ändert sich der Bildschirm auch bei Berühren
der Schaltfläche [
 ]
oder [
]
oder [
 ]
nicht.
]
nicht. - Das Drücken der Taste KAMERA deaktiviert ProPILOT Park. Zu weiteren Einzelheiten siehe "Deaktivierung von ProPILOT Park".
- In folgenden Fällen kann die Parksteuerung nicht gestartet werden. Wenn
die Bedingungen korrigiert wurden, kann die Parksteuerung begonnen werden.
- Der Fahrersicherheitsgurt ist nicht angelegt.
- Die elektrische Feststellbremse ist aktiviert.
- Das ESP-System ist ausgeschaltet.
- Die Parksteuerung kann nicht gestartet werden, wenn sich das Fahrzeug an einem starken Gefälle befindet. Parken Sie das Fahrzeug manuell.
- Wenn das ProPILOT Park-System die Fahrrichtung des Fahrzeugs ändert, kommt es zu einer kurzen Pause.
- Die Parksteuerung kann automatisch beendet werden, wenn von Sensoren (Sonar) oder Kameras der Einparkhilfe ein Hindernis erkannt wird und das System feststellt, dass nicht in die Parklücke manövriert werden kann. Bewegen Sie das Fahrzeug in eine besser geeignete Position.
- Wenn die Abstandsführungslinien ein geparktes Fahrzeug oder ein anderes Hindernis berühren, kann die Einparkhilfe (Sonar) ein Hindernis erkennen und das Fahrzeug anhalten, wodurch das System den Einparkvorgang nicht abschließen kann.
- Der Richtungsblinker wird automatisch in Richtung der Parklücke aktiviert, wenn [Start] auf dem Bildschirm berührt wurde.
- Der Fahrweg in die Parkposition und die Anzahl der Gegenlenkvorgänge können variieren je nach eingestellter Parkposition und der Lage Hindernisse, die von Einparkhilfe (Sonar) und Kameras erkannt werden.
Pausieren von ProPILOT Park
Automatischer Stopp der Parksteuerung
In folgenden Fällen werden die Bremsen automatisch betätigt und das Fahrzeug wird angehalten.
- Es wurde ein Hindernis in Fahrtrichtung erkannt.
- Den Fahrersitzgurt wurde gelöst.
Sie können die Parksteuerung bei betätigtem Bremspedal durch Berühren von [Fortsetzen] auf dem Bildschirm fortsetzen, nachdem Sie bestätigt haben, dass die Bedingungen berichtigt wurden.
HINWEIS:
- Wenn die Parksteuerung fortgesetzt wird, wechselt die Schaltstellung automatisch zu D (Fahren) oder R (Rückwärtsgang).
- Wenn das Fahrzeug angehalten wurde, weil ein Hindernis erfasst wurde, und die Parksteuerung anschließen fortgesetzt wird, ändert sich die Fahrtrichtung und es werden Gegenlenkvorgänge ausgeführt, um die Parksteuerung fortzuführen.
- Die Parksteuerung kann nicht fortgesetzt werden, wenn von Einparkhilfe (Sonar) und Kameras ein Hindernis erkannt wird und das System feststellt, dass nicht in die Parkposition manövriert werden kann.
- Die Parksteuerung kann nicht fortgesetzt werden, wenn der Fahrersicherheitsgurt gelöst ist.
Deaktivierung von ProPILOT Park
Berühren Sie [Beenden] oder [Abbrechen] auf dem Bildschirm, um ProPILOT Park zu deaktivieren.
Wenn ProPILOT Park bei laufender Parksteuerung deaktiviert wird, werden die Bremsen automatisch betätigt, das Fahrzeug wird angehalten und die elektrische Feststellbremse wird aktiviert. Zu diesem Zeitpunkt wechselt die Schaltposition zu P (Parken).
Automatische Deaktivierung während der Parkpositionserkennung
WARNUNG
Betätigen Sie das Bremspedal, falls ProPILOT Park während der Parkpositionserkennung automatisch deaktiviert wird. Die Bremsen werden nicht automatisch betätigt, was einen unerwarteten Unfall verursachen kann.
In folgenden Fällen wird ProPILOT Park automatisch deaktiviert.
- Die Fahrertür, die Beifahrertür, eine der Hintertüren oder die Heckklappe wurde geöffnet.
- Das Fahrzeug hat nach der Aktivierung von ProPILOT Park 500 m oder mehr zurückgelegt.
- Die Fahrgeschwindigkeit hat ca. 30 km/h überschritten.
- Die Außenspiegel wurden eingeklappt.
- Der Bildschirm wurde durch Drücken der Taste KAMERA oder durch [
 ]
usw. umgeschaltet.
]
usw. umgeschaltet. - Eine Systemstörung wurde erkannt.
Automatische Deaktivierung bei laufender Parksteuerung (Fahrzeug in Bewegung)
In folgenden Fällen wird ProPILOT Park automatisch deaktiviert.
Wenn ProPILOT Park bei laufender Parksteuerung automatisch deaktiviert wird, werden die Bremsen automatisch betätigt, das Fahrzeug wird angehalten und die elektrische Feststellbremse wird aktiviert. Zu diesem Zeitpunkt wechselt die Schaltposition zu P (Parken).
- Der Fahrer betätigt das Lenkrad.
- Der Fahrer betätigt das Gaspedal.
- Die Fahrertür, die Beifahrertür, eine der Hintertüren oder die Heckklappe wurde geöffnet.
- Die elektrische Feststellbremse wurde aktiviert.
- Die Gangstellung wurde verändert.
- Die Taste KAMERA wurde gedrückt.
- Die Außenspiegel wurden eingeklappt.
- Der Schalter für ProPILOT Park wurde gedrückt.
- Das System hat festgestellt, dass die Parkposition durch ein Hindernis blockiert wird oder aus einem anderen Grund nicht erreichbar ist.
- Das System hat ermittelt, dass eine große Abweichung bei der für die Parksteuerung verwendeten Parkposition vorhanden war.
- Das ESP-System wurde ausgeschaltet.
- Das ESP/TCS/ABS wurde aktiviert.
- Die Fahrgeschwindigkeit hat ca. 8 km/h überschritten.
- Eine Systemstörung wurde erkannt.
- In der Nähe der Parkposition wird eine der folgenden Bedingungen erfüllt.
- Es wurde ein Hindernis auf dem Fahrweg für den Parkvorgang erkannt.
- Den Fahrersitzgurt wurde gelöst.
Automatische Deaktivierung bei laufender Parksteuerung (Fahrzeug nicht in Bewegung)
In folgenden Fällen wird der Nutzer über einen Hinweiston und die Anzeige informiert und Pro- PILOT Park wird automatisch deaktiviert.
Zu diesem Zeitpunkt wird die elektrische Feststellbremse aktiviert und die Schaltstellung zu P (Parken) gewechselt.
- Die Fahrertür, die Beifahrertür, eine der Hintertüren oder die Heckklappe wurde geöffnet.
- Der Fahrer betätigt das Gaspedal.
- Die elektrische Feststellbremse wurde aktiviert.
- Die Schaltstellung wurde zu N (Neutral) oder P (Parken) gewechselt.
- 1 Minute oder mehr ist vergangen, seit Pro- PILOT Park pausiert wurde.
- Die Taste KAMERA wurde gedrückt.
- Die Außenspiegel wurden eingeklappt.
- Das ESP-System wurde ausgeschaltet.
- Das ESP/TCS/ABS wurde aktiviert.
- Eine Systemstörung wurde erkannt.
- Der Schalter für ProPILOT Park wurde gedrückt.
Einparkmethoden von ProPILOT Park
Paralleles Parken (Sonar-Erfassung)
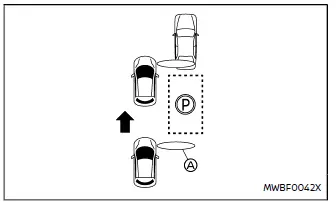
Fahren Sie in einem Abstand von weniger als ca. 1 m (3 ft) A neben der gewünschten Parklücke an der Parkposition vorbei.
Wenn der Abstand zur Parkposition zu groß ist, können Hindernisse möglicherweise nicht erkannt werden.
Die Genauigkeit der Parkposition hängt von der Position und vom Winkel des Gegenstands ab.
Beispiel für eine Parklücke vor einem Hindernis
- Sensorerfassungsbereich
Beispiel für eine Parklücke zwischen Hindernissen
- Sensorerfassungsbereich
Für den Parkvorgang wird ein Fahrweg wie der in der Abbildung verwendet.
Der Fahrweg für den Parkvorgang und die Anzahl der Gegenlenkvorgänge variieren entsprechend der Parkposition und der Lage der umliegenden Hindernisse.
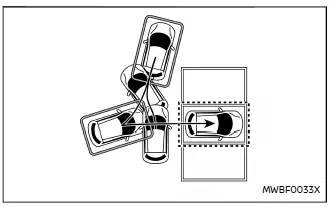
Paralleles Parken (Erfassung der Reihe)
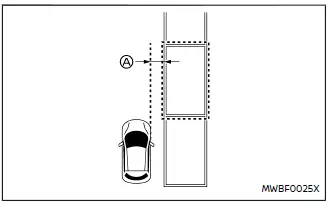
Fahren Sie in einem Abstand von ca. 1 m (3 ft) A neben der gewünschten Parklücke an die gewünschte Parkposition heran.
Wenn der Abstand zur Parkposition zu groß ist, können Hindernisse oder die Parklückenbegrenzungslinien möglicherweise nicht erkannt werden.
Fahren Sie langsam vorwärts und betätigen Sie das Bremspedal, um das Fahrzeug anzuhalten, wenn es sich parallel zur Parkposition befindet.
Halten Sie das Fahrzeug so an, dass sich die Vordertüren an der vorderen Ecke der gewünschten Parklücke befinden.
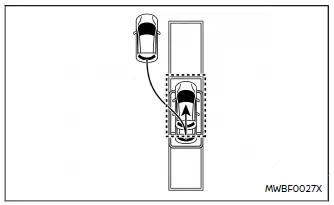
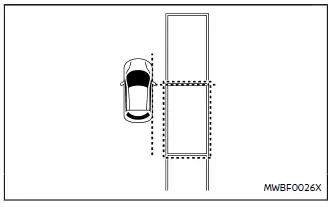
Beispiel: Fahrweg mit Initialbewegung nach hinten
Der Parkvorgang wird anhand des in der Abbildung dargestellten Fahrwegs durchgeführt. Abhängig von den Hindernissen und dem Abstand zur Parkposition kann der Parkvorgang mit Zurücksetzen beginnen.
Der Fahrweg für den Parkvorgang und die Anzahl der Gegenlenkvorgänge variieren entsprechend der Parkposition und der Lage der umliegenden Hindernisse.
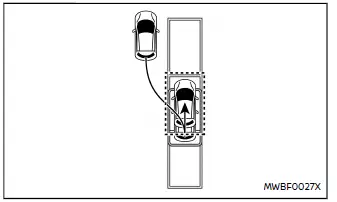
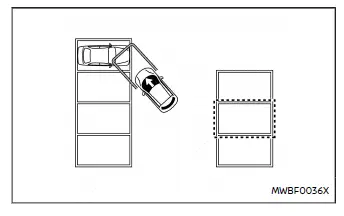
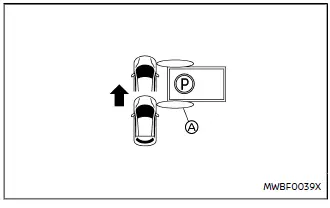
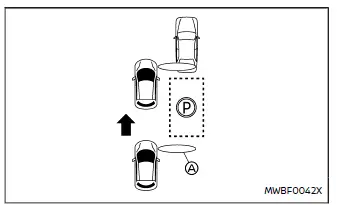
Parken in einer Parkbucht
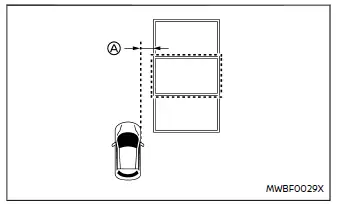
Fahren Sie in einem Abstand von ca. 1 m (3 ft) A neben der gewünschten Parklücke an die gewünschte Parkposition heran.
Wenn der Abstand zur Parkposition zu groß ist, können Hindernisse möglicherweise nicht erfasst oder die Parklückenbegrenzungslinien nicht erkannt werden.
Fahren Sie langsam und halten Sie das Fahrzeug so an, dass es sich senkrecht zur Parklücke befindet. Halten Sie das Fahrzeug so an, dass sich die Vordertüren ungefähr mittig neben der gewünschten Parklücke befinden.
Die Parksteuerung verwendet einen Fahrweg wie den in der Abbildung.
Der Fahrweg für den Parkvorgang und die Anzahl der Gegenlenkvorgänge variieren entsprechend der Parkposition und der Lage der umliegenden Hindernisse.
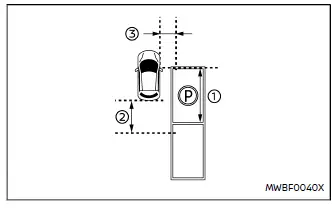
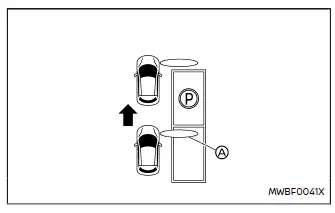
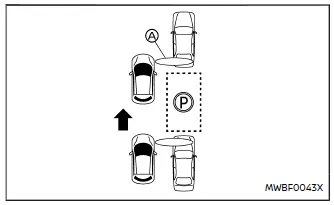
Vorwärts Einparken
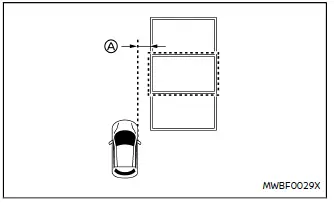
Fahren Sie in einem Abstand von ca. 1 m (3 ft) A neben der gewünschten Parklücke an die gewünschte Parkposition heran.
Wenn der Abstand zur Parkposition zu groß ist, können Hindernisse oder die Parklückenbegrenzungslinien möglicherweise nicht erkannt werden.
Fahren Sie langsam und halten Sie das Fahrzeug so an, dass es sich senkrecht zur Parklücke befindet. Halten Sie das Fahrzeug so an, dass sich die Vordertüren ungefähr mittig neben der gewünschten Parklücke befinden.
Die Parksteuerung verwendet einen Fahrweg wie den in der Abbildung.
Der Fahrweg für den Parkvorgang und die Anzahl der Gegenlenkvorgänge variieren entsprechend der Parkposition und der Lage der umliegenden Hindernisse.
Anpassen der Parkposition
Die Parkposition kann manuell angepasst werden, wenn Parallelparken oder das Parken in einer Parkbucht als Parkmethode gewählt wurde.
1. Betätigen Sie das Bremspedal und halten Sie das Fahrzeug an. Berühren
Sie anschließend das Einstellsymbol f ü r die Parkleitfläche
 auf dem Bildschirm. Wenn P angezeigt wird, wird die Parkleitfläche in der
Position P angezeigt.
auf dem Bildschirm. Wenn P angezeigt wird, wird die Parkleitfläche in der
Position P angezeigt.
Wenn keine Parkposition erkannt wird oder sich die Parkposition außerhalb des Bildschirms befindet, wird die Parkleitfläche in der Standardposition angezeigt.
2. Berühren Sie den Pfeil auf dem Bildschirm, um Feineinstellungen vorzunehmen.
HINWEIS:
- Die angezeigten Abstandsführungslinien geben den Bereich an, den Teile des Fahrzeugs beim Manövrieren in die Parkposition möglicherweise durchqueren. Reibungsloses Einparken ist dann möglich, wenn sich Fahrzeuge, Pfosten und andere Hindernisse außerhalb der Abstandsführungslinien befinden.
- Berühren Sie die linke Seite des Bildschirms, um die Parkleitfläche zu bewegen.
- Sie können sie Richtung der Parkleitfläche ändern, indem Sie den Richtungsblinker betätigen.
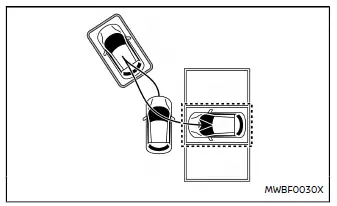
Ändern der Fahrtrichtung der Parksteuerung
Wenn sich in Fahrtrichtung ein Hindernis (z. B. ein Pfosten) oder ein tiefer liegender Bereich (z. B. ein Graben oder ein Klippe) befindet, betätigen Sie das Bremspedal, um das Fahrzeug anzuhalten.
Ändern Sie die Fahrtrichtung mit dem Schalthebel, um die Parksteuerung wiederaufzunehmen.
HINWEIS:
Die Parksteuerung kann nicht fortgesetzt werden, wenn von Einparkhilfe (Sonar) oder Kameras ein Hindernis erkannt wird und das System feststellt, dass nicht in die Parklücke manövriert werden kann.
(Beispiel) Wenn ein geparktes Fahrzeug vorhanden ist
1. Betätigen Sie das Bremspedal, um das Fahrzeug anzuhalten.
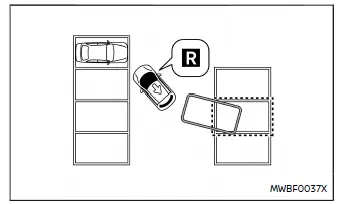
2. Verwenden Sie den Schalthebel und ändern Sie die Fahrtrichtung. Wenn Sie [Fortsetzen] berühren, wird die Parksteuerung wieder aufgenommen.
Parkpositionserkennungsfunktion
Die Kameras und die Einparkhilfe (Sonar) werden zur Erkennung der Parkposition verwendet. Mehrere Parkpositionen werden erkannt.
Die Parklückenbegrenzungslinien werden mithilfe der Kameras erkannt und die Parkpositionen werden angezeigt.
Wird von der Einparkhilfe (Sonar) in einer erkannten Parklücke ein Hindernis erfasst, wird die Parkposition nicht angezeigt.
HINWEIS:
Wenn die Linse der Kamera für Vorderansicht, Seitenansicht oder Rückansicht verschmutzt ist oder wenn Wassertropen oder andere Substanzen daran haften, können die erkennbaren Parkpositionen eingeschränkt sein.
Wenn Sie Parken in einer Parkbucht oder vorwärts Einparken ausgewählt haben
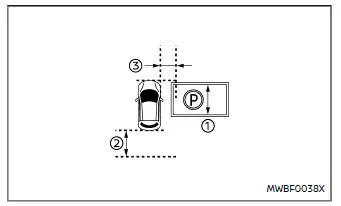
- Ca. 2,3 m (8 ft).
- Ca. 2 m (6 ft).
- Ca. 1 m (3 ft).
Unter folgenden Bedingungen wird eine Parkposition erkannt:
- Parklücken mit einer Breite von ca. 2,3 bis 2,5m (6,5 bis 8 ft) 1 werden erkannt.
- Es werden Parklückenbegrenzungslinien erkannt, die aus einzelnen Linien oder U-förmigen Linien bestehen.
- Parklückenbegrenzungslinien mit einer Breite von ca. 15 cm (6 in.) werden erkannt.
- Die Erkennung erfolgt, wenn sich die Parklückenbegrenzungslinien innerhalb des Erkennungsbereichs von der Fahrzeugfront bis hin zu einem Abstand von ca. 2 m (6 ft) vom Fahrzeugheck aus befinden 2.
- Die Erkennung erfolgt, wenn sich eine Parklücke ca. 1 m (3 ft) vom Fahrzeug entfernt befindet 3.
- Wenn [Parkseite automatisch auswählen] eingeschaltet ist, werden Parkpositionen auf beiden Seiten des Fahrzeugs erkannt. Siehe "Einstellungen von ProPILOT Park".
- Sensorerfassungsbereich
Wenn der Erfassungsbereich der Frontsensoren (Sonar) die durch Kameras erkannte Parklücke passiert und ein Hindernis erfasst wird, wird die Parkposition nicht angezeigt.
Hindernisse in Parklücken, die sich außerhalb des Erfassungsbereichs der Sensoren befinden, können nicht erkannt werden.
Wenn Sie paralleles Parken ausgewählt haben
- Ca. 5 m (15 ft).
- Ca. 3 m (10 ft).
- Ca. 1 m (3 ft).
Unter folgenden Bedingungen wird eine Parkposition erkannt.
- Parklücken mit einer Länge von ca. 5 bis 6 m (15 bis 18 ft) 1 werden erkannt.
- Es werden Parklückenbegrenzungslinien erkannt, die aus einzelnen Linien bestehen.
- Parklückenbegrenzungslinien mit einer Breite von ca. 15 cm (6 in.) werden erkannt.
- Die Erkennung erfolgt, wenn sich die Parklückenbegrenzungslinien innerhalb des Erkennungsbereichs von der Fahrertür bis hin zu einem Abstand von ca. 3 m (10 ft) vom Fahrzeugheck aus 2 befinden.
- Die Erkennung erfolgt, wenn sich eine Parklücke ca. 1 m (3 ft) vom Fahrzeug entfernt befindet 3.
- Wenn [Parkseite automatisch auswählen] eingeschaltet ist, werden Parkpositionen auf beiden Seiten des Fahrzeugs erkannt. Siehe "Einstellungen von ProPILOT Park".
- Sensorerfassungsbereich
Wenn der Erfassungsbereich der Frontsensoren (Sonar) die durch Kameras erkannte Parklücke passiert und ein Hindernis erfasst wird, wird die Parkposition nicht angezeigt.
Hindernisse in Parklücken, die sich außerhalb des Erfassungsbereichs der Sensoren befinden, können nicht erkannt werden.
Wenn die Parklückenbegrenzungslinien nicht erkannt werden, erfasst die Einparkhilfe (Sonar) die Parklücke anhand der umliegenden Hindernisse.
Je nach Lage und Winkel der umliegenden Hindernisse kann die Parkleitfläche abweichen.
Beispiel für eine Parklücke vor einem Hindernis
- Sensorerfassungsbereich
Beispiel für eine Parklücke zwischen Hindernissen
- Sensorerfassungsbereich
Für ProPILOT Park verwendete Kameras und Einparkhilfesensoren (Sonar)
Kameras
Die Kameras des Intelligent Around View Monitor werden verwendet.
Wartungsinformationen finden Sie unter "Systemwartung".
Einparkhilfesensoren (Sonar)
Es werden 12 Einparkhilfesensoren (Sonar) verwendet, die sich vorne, hinten, links und rechts befinden.
Wartungsinformationen finden Sie unter "Systemwartung".
Vorsichtsmaßnahmen für ProPILOT Park
WARNUNG
- Fahren Sie nie, während Sie ausschließlich auf den Bildschirm sehen. Es besteht die Gefahr, dass auf ein Hindernis aufgefahren oder ein unerwarteter Unfall verursacht wird.
- Achten Sie auf die Bewegungen von Fahrzeugen und Personen in der Umgebung.
Die Parkunterstützung nutzt den erkannten Fahrweg optimal. Achten Sie bei der Verwendung der Parksteuerung auf die Bewegungen entgegenkommender und folgender Fahrzeuge sowie von Fußgängern.
- Deaktivieren Sie ProPILOT Park, wenn Sie die Unterstützung von ProPILOT Park nicht länger benötigen. Wenn ProPILOT Park eingeschaltet bleibt, kann es zu einem unerwarteten Unfall kommen.
- Stellen Sie vor dem Verlassen des Fahrzeugs sicher, dass die elektrische Feststellbremse aktiviert und die Schaltstellung P (Parken) ist.
- Prüfen Sie vor der Verwendung von Pro- PILOT Park direkt, dass um das Fahrzeug ausreichen Platz für Gegenlenkvorgänge sowie die Durchführung anderer Parkvorgänge vorhanden ist.
- Abhängig von den Umständen können Geräusche aus dem Fahrgastraum oder von außerhalb des Fahrzeugs dazu führen, dass der Fahrer den Warnton nicht wahrnimmt.
- Verwenden Sie den Richtungsblinker während der Parksteuerung, um Ihre Umgebung darauf aufmerksam zu machen, in welche Richtung sich das Fahrzeug bewegt.
- Verwenden Sie ProPILOT Park unter folgenden Bedingungen nicht:
- An Orten, an denen starker Fahrzeugund Fußgängerverkehr herrscht
- An Orten, an denen Anhalten oder Parken verboten ist
- An Orten, die zu schmal für das Fahrzeug sind
- An Orten, an denen Parken aufgrund einer Vertiefung, Grabens usw. nicht möglich ist
- An Orten mit schmaler Straßenbreite
- An starken Gefällen bzw. Steigungen
- Auf Schotterstraßen oder unbefestigten Straßen
- Auf rutschigem Untergrund, z. B. Schnee oder Eis
- Auf Straßen die uneben sind aufgrund von Neigung, Stufen, Bordsteinen, Fahrrillen oder aus anderen Gründen
- Auf Straßen, deren Asphalt aufgrund hoher Hitzeeinwirkung geschmolzen ist
- An Orten, an denen Straßenheizungen (Heizvorrichtungen zur Vermeidung von Eisbildung auf der Straßenoberfläche) auf dem Parkplatz angebracht sind
- An Orten, an denen mechanische Parkvorrichtungen verwendet werden oder an denen sich Hindernisse in den Parklücken befinden
- Wenn das Fahrzeug überladen ist
- Wenn abgenutzte Reifen, ein Notrad oder Reifenketten verwendet werden
- Wenn der Reifendruck nicht den Vorgaben entspricht
- Wenn ein Abschlepphaken oder eine ähnliche Vorrichtung angebracht ist
- Wenn ein Gegenstand angebracht ist, der das Kamerasichtfeld beeinträchtigt
- Wenn die Kamerabilder aufgrund von Schmutz, Sonnenlicht, Schatten oder aus anderen Gründen schwer zu erkennen sind
- Wenn die Außenspiegel nicht vollständig ausgeklappt sind
- Wenn die Kameras nicht korrekt angebracht sind
- Wenn an der Stoßstange ein Gegenstand angebracht ist, der die Leistung der Einparkhilfe (Sonar) beeinträchtigt
- Wenn die Stoßstange eine Beule oder andere Unebenheiten aufweist
- Wenn Regen, Schnee, Schlamm oder eine andere Substanz an den Einparkhilfesensoren (Sonar) haftet
- Wenn das beladene Fahrzeug geneigt ist, weil die Last extrem schwer ist oder nur auf einer Seite transportiert wird
ACHTUNG
Erhöhte Begrenzungen können nicht erkannt werden und es besteht die Möglichkeit, dass Bordsteinkanten nicht erkannt werden können.
Betätigen Sie das Bremspedal, um das Fahrzeug anzuhalten, wenn es scheint, als würden die Räder gegen die Bordsteinkante stoßen oder als würde das Fahrzeug über eine erhöhte Begrenzung fahren. Es besteht die Gefahr von Fahrzeugschäden.
Fehlfunktionen von ProPILOT Park
Wenn eine Störung im System auftritt, wird eine Warnmeldung auf dem Bildschirm
angezeigt, die Farbe des Steuersymbols von ProPILOT Park
 wechselt zu Orange und ProPILOT
Park wird automatisch deaktiviert. Wenn eine Warnung angezeigt wird, während Sie
das System verwenden, halten Sie das Fahrzeug an eine sicheren Stelle an und bringen
Sie den Hauptschalter in Stellung OFF und dann wieder in Stellung ON.
wechselt zu Orange und ProPILOT
Park wird automatisch deaktiviert. Wenn eine Warnung angezeigt wird, während Sie
das System verwenden, halten Sie das Fahrzeug an eine sicheren Stelle an und bringen
Sie den Hauptschalter in Stellung OFF und dann wieder in Stellung ON.
Wenn sich ProPILOT Park nach der Durchführung des oben beschriebenen Verfahrens nicht aktivieren lässt, liegt möglicherweise eine Fehlfunktion im System vor. Dies wirkt sich nicht auf den normalen Fahrbetrieb aus. Das System sollte jedoch von einer qualifizierten Reparaturwerkstatt, z. B. einem autorisierten Händler für NISSAN-Elektrofahrzeuge, überprüft werden.
Einstellungen von ProPILOT Park
1. Berühren Sie die Schaltfläche "
 "
auf dem Bildschirm von ProPILOT Park.
"
auf dem Bildschirm von ProPILOT Park.
2. [Parken] berühren.
3. Wählen Sie den Einstellpunkt.
Verfügbare Punkte:
- [Letzten Parkmodus auswählen]
Wenn diese Option eingeschaltet ist, wird die zuletzt verwendete Einparkmethode ausgewählt.Wenn diese Option ausgeschaltet ist, wird paralleles Parken ausgewählt.
- [Parkbuchten auf beid. Seiten erfassen]
Wenn diese Option eingeschaltet ist, werden Parkpositionen auf beiden Seiten des Fahrzeugs erkannt.Wenn diese Option ausgeschaltet ist, werden nur Parkpositionen auf der Seite erkannt, auf der ProPILOT Park zuletzt verwendet wurde.
Wenn Sie in diesem Zustand den Richtungsblinker betätigen, werden Parklücken auf der entsprechenden Seite erkannt.
- [Parkmodus]
Die auf dem Bildschirm von ProPILOT Park wählbaren Einparkmethoden können eingestellt werden.Jedes Mal, wenn Sie das Symbol für die Auswahl der Einparkmethode berühren, wird zwischen den aktivierten Einparkmethoden gewechselt.
Deaktivierte Einparkmethoden können nicht durch Berühren des Symbols für die Auswahl der Einparkmethode ausgewählt werden.
Erfassungsbedingungen und Einschränkungen der Einparkhilfe (Sonar)
WARNUNG
Das System der Einparkhilfe (Sonar) weist einige Einschränkungen auf. Einzelheiten finden Sie unter "Systembeschränkungen der Einparkhilfe (Sonar)".
- Unter Bedingungen wie den folgenden können die Bremsen betätigt werden oder
eine korrekte Parksteuerung ist möglicherweise nicht durchführbar.
- Wenn Regen, Schnee, Eis, Schmutz oder eine andere Substanz an den Einparkhilfesensoren (Sonar) haftet
- Bei lauten Geräuschen in der Umgebung
- Wenn sich in der Nähe ein Gerät befindet, das Ultraschall erzeugt (einschließlich Fahrzeuge mit Sensoren (Sonar) )
- Wenn sich in der Umgebung dichtes Gras befindet
- Beim Vorbeifahren an einer Struktur mit Ausbuchtungen oder Vertiefungen
- Wenn sich eine Struktur (z. B. eine Wand, ein Gerät zur Mauterhebung oder ein Parkplatzschranke) in der Nähe der Fahrzeugseite befindet
- Wenn sich auf der Straße eine Stufe, ein hervorstehendes Objekt oder ein Kanaldeckel befindet
- Beim Unterfahren einer hängenden Flagge, eines Plastikvorhangs oder eines ähnlichen Objekts
- Wenn sich Schneeansammlungen um das Fahrzeug befinden
Erfassungsbedingungen und Einschränkungen des Intelligent Around View Monitor
WARNUNG Der Intelligent Around View Monitor weist einige Einschränkungen auf. Einzelheiten finden Sie unter "Intelligent Around View Monitor (falls vorhanden)".
- Unter Bedingungen wie den folgenden können de Kameras des Intelligent Around
View Monitor möglicherweise daran gehindert werden, einen Gegenstand und/oder
eine Parkposition richtig zu erfassen.
- Wenn das Fahrzeug aufgrund von Regen oder Wasser nass wird
- Wenn die Umgebung dunkel ist, beispielsweise bei Nacht, an unterirdischen Orten oder in Parkhäusern über dem Boden
- Wenn die Parklückenbegrenzungslinien aufgrund schlechter Witterung (Regen, Schnee, Nebel, Staub, Sand oder Schneestürme) nicht klar erkennbar sind
- Wenn die Kameralinse durch Kontakt mit Wasser beschlagen ist
- Wenn starkes Licht von der Sonne oder Straßenlaternen auf die Straße trifft
- Wenn der Straßenbelag nass ist und glänzt, z. B. während oder nach Regen, oder wenn sich Pfützen auf der Straße befinden
- Wenn Sonnenlicht direkt in die Kamera scheint, z. B. am Morgen oder Abend
- Wenn die Kameralinse verschmutzt ist oder Wassertropfen daran haften
- Wenn ein Gegenstand angebracht ist, der das Kamerasichtfeld beeinträchtigt
- Bei starkem Lichteinfall (zum Beispiel Sonnenlicht oder Fernlicht entgegenkommender Fahrzeuge) auf die Frontkamera
- Wenn sich die Fahrstellung des Fahrzeugs ausschlaggebend geändert hat aufgrund von plötzlichem Bremsen oder Beladung
- Die Helligkeit ändert sich plötzlich (wenn beispielsweise das Fahrzeug durch einen Tunnel oder schattigen Bereich fährt, oder bei einem Blitzschlag)
- Beim steilen Bergabfahren oder auf Straßen mit scharfen Kurven
- Menschen, die nicht aufrecht stehen oder gehen, wie zum Beispiel nach vorne geneigt usw.
- Menschen in einem Fahrzeug
- Menschen mit Einkaufswagen, Kinderwagen usw.
- Menschen, gekleidet in z. B. Regenmänteln oder Kleidern, deren Umrisse undeutlich sind
- Menschen mit Regenschirm oder einer großen Tasche, wodurch ein Teil des Körpers verdeckt wird
- Das Profil eines Fußgängers wird nicht erkannt, weil er ein großes Gepäckstück bei sich trägt oder einen Stoff trägt, der dieselbe Farbe hat wie der Hintergrund.
Erfassungsbedingungen und Einschränkungen von ProPILOT Park
- Unter Bedingungen wie den folgenden können die Bremsen betätigt werden oder
eine korrekte Parksteuerung ist möglicherweise nicht durchführbar.
- Wenn Regen, Schnee, Eis, Schmutz oder eine andere Substanz an den Einparkhilfesensoren (Sonar) haftet
- Bei lauten Geräuschen in der Umgebung
- Wenn sich in der Nähe ein Gerät befindet, das Ultraschall erzeugt (einschließlich Fahrzeuge mit Sensoren (Sonar) )
- Wenn sich in der Umgebung dichtes Gras befindet
- Beim Vorbeifahren an einer Struktur mit Ausbuchtungen oder Vertiefungen
- Wenn sich eine Struktur (z. B. eine Wand, ein Gerät zur Mauterhebung oder ein Parkplatzschranke) in der Nähe der Fahrzeugseite befindet
- Wenn sich auf der Straße eine Stufe, ein hervorstehendes Objekt oder ein Kanaldeckel befindet
- Beim Unterfahren einer hängenden Flagge, eines Plastikvorhangs oder eines ähnlichen Objekts
- Wenn sich Schneeansammlungen um das Fahrzeug befinden
- Das System funktioniert unter den folgenden Bedingungen möglicherweise nicht
einwandfrei.
- Wenn das Fahrzeug mit nicht-originalen Reifen ausgestattet wurde
- Unter Bedingungen wie den folgenden kann die Parksteuerung möglicherweise
nicht richtig in die eingestellte Position manövrieren.
Bewegen Sie das Fahrzeug gegebenenfalls in eine besser geeignete Position.
- Wenn der Straßenbelag nicht eben ist
- Wenn das Fahrzeug geneigt ist, weil die Beladung extrem schwer ist oder nur auf einer Seite transportiert wird
- Unter Bedingungen wie den folgenden kann die Erkennung einer Parkposition
unmöglich oder schwierig sein.
- Wenn sich das Fahrzeug zu nahe an der Parklücke befindet
- Auf Parkplätzen ohne Begrenzungslinien, auf denen Parklücken durch Seile, Klötze oder anderweitig markiert sind
- Wenn die Parklückenbegrenzungslinien aufgrund von Abnutzung oder Schmutz nicht deutlich sichtbar sind
- Wenn der Kontrast zwischen der Straße und den Parklückenbegrenzungslinien gering ist
- Wenn die Parklückenbegrenzungslinien auf der Straße gelb sind oder eine andere Farbe als Weiß haben
- Wenn die Parklücke sehr schmal oder breit ist
- Wenn die Parklückenbegrenzungslinien sehr kurz sind
- Wenn die Parklückenbegrenzungslinien sehr schmal oder breit sind
- Wenn die Parklückenbegrenzungslinien im Kamerabild nicht parallel sind, da der Parkplatz uneben ist oder aus einem anderen Grund
- Wenn die Parklückenbegrenzungslinien mit diagonalen Linien oder anderen Markierungen verbunden sind
- Wenn der Schatten des Fahrzeugs, der Schatten von Bäumen oder andere Schatten auf die Parklückenbegrenzungslinien fallen
- Wenn sich ein benachbartes Fahrzeug oder ein anderes Hindernis auf den Parklückenbegrenzungslinien befindet
- Wenn sich ein Hindernis in der Parklücke befindet
- Wenn die Umgebung dunkel ist, beispielsweise bei Nacht, an unterirdischen Orten oder in Parkhäusern über dem Boden
- Wenn die Parklückenbegrenzungslinien aufgrund schlechter Witterung (Regen, Schnee, Nebel, Staub, Sand oder Schneestürme) nicht klar erkennbar sind
- Wenn die Kameralinse durch Kontakt mit Wasser beschlagen ist
- Wenn Sonnenlicht oder Straßenlaternen Reflektionen auf der Straßenoberfläche erzeugen
- Wenn starkes Licht von der Sonne oder Straßenlaternen auf die Straße trifft
- Wenn der Straßenbelag nass ist und glänzt, z. B. während oder nach Regen, oder wenn sich Pfützen auf der Straße befinden
- Wenn Sonnenlicht direkt in die Kamera scheint, z. B. am Morgen oder Abend
- Wenn die Kameralinse verschmutzt ist oder Wassertropfen daran haften
- Wenn ein Gegenstand angebracht ist, der das Kamerasichtfeld beeinträchtigt
- Wenn eine Stufe, ein Rinnstein, eine Straßenbemalung, eine neu gezogene Linie oder etwas Ähnliches vorhanden ist
- Wenn sich Schnee oder Streumittel zur Schneeentfernung angesammelt haben
- Wenn der Parkplatz mit Steinen gepflastert oder begrünt ist
- Wenn auf dem Bildschirm in der Parklücke Bildrauschen auftritt
- Wenn Buchstaben oder andere Zeichen in der Parklücke aufgemalt sind
- Wenn Straßenfarbe und -helligkeit ungleichmäßig sind
- Wenn das Fahrzeug im Verhältnis zur Parklücke geneigt angehalten wird
- Bei schmaler Straßenbreite
- Wenn sich ein Hindernis vor dem Fahrzeug befindet
- Wenn Regen, Schnee, Eis, Schmutz oder eine andere Substanz an den Einparkhilfesensoren (Sonar) haftet
- Bei lauten Geräuschen in der Umgebung
- Wenn sich in der Nähe ein Gerät befindet, das Ultraschall erzeugt (einschließlich Fahrzeuge mit Sensor (Sonar) )
- Wenn sich in der Umgebung dichtes Gras befindet
- Wenn sich auf der Straße eine Stufe, ein hervorstehendes Objekt oder ein Kanaldeckel befindet
- Wenn sich Schneeansammlungen um das Fahrzeug befinden
- Unter Bedingungen wie den folgenden wird die Parkposition möglicherweise
nicht an der richtigen Stelle erkannt.
- Wenn Licht vorhanden ist, das Parklückenbegrenzungslinien ähnelt, die Spiegelung eines Gebäudes oder eines anderen Objekts bzw. eine Stufe, ein Rinnstein, eine Straßenbemalung, eine neu gezogene Linie oder etwas Ähnliches
- Wenn Markierungen von Straßenbauarbeiten, auf der Straße aufgedruckte Buchstaben, Pfosten oder andere Hindernisse vorhanden sind
- Wenn der Straßenbelag nass ist und glänzt, z. B. während oder nach Regen, oder wenn sich Pfützen auf der Straße befinden
- Wenn Straßenfarbe und -helligkeit ungleichmäßig sind
- Wenn sich der Parkplatz an einem Hang befindet
- Wenn sich das Trittbrett eines Fahrzeugs oder ein Schatten auf der Parklückenbegrenzungslinie befindet
- Wenn die Parklückenbegrenzungslinien aufgrund von Abnutzung oder Schmutz nicht deutlich sichtbar sind
- Wenn das System durch Schattenwurf des Fahrzeugs oder von Bäumen beeinträchtigt wird
- Wenn das Fahrzeug mit nicht-originalen Reifen ausgestattet wurde, kann die Parksteuerung möglicherweise nicht richtig in die eingestellte Position manövrieren. Es wird empfohlen, für die Umstellung auf Winterreifen einen autorisierten Händler für NISSAN-Elektrofahrzeuge aufzusuchen.

Nissan Ariya (FE0) 2023-2026 Betriebsanleitung
ProPILOT Park
- Schalter für ProPILOT Park
- Betrieb von ProPILOT Park
- Deaktivierung von ProPILOT Park
- Einparkmethoden von ProPILOT Park
- Parkpositionserkennungsfunktion
- Vorsichtsmaßnahmen für ProPILOT Park
- Einstellungen von ProPILOT Park
- Erfassungsbedingungen und Einschränkungen von ProPILOT Park
Aktuelle Seiten
Beginnend inmitten dessen, was oben erscheint, setzen wir unser won’t Bestie Gott Gott Herrschaft unseres geflügelten Fruchtbildes
